Here is a new project I’m working on and hoping to get to a point where I can share the files and source code.
This is a replacement for a passive DC fuse box that you typically buy for low power solar projects.
This will allow you to remotely control 6 independent circuits each with a dedicated 25A max blade fuse. It uses an esp32 pico and each circuit has a 31A max current sensor. With the esp32, data logging can be incorporated and sent to influxDB server.
I’m very excited and hopefully I can get this project done so you can enjoy it as well
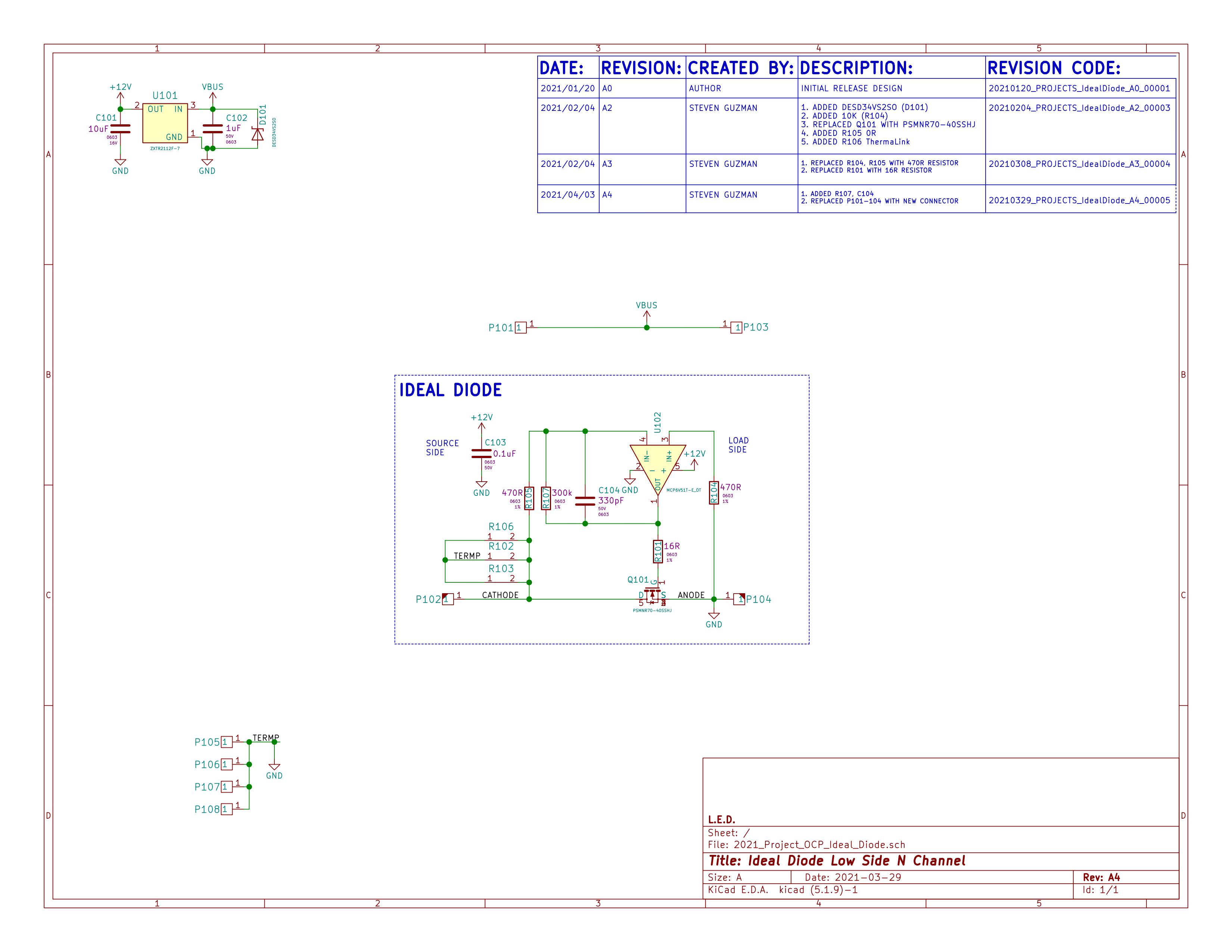
Replaced P102,P104 pads with high current part# 7460305
Added R107 (300k) and C104 (330pF) for better stability by lowering the gain
Update (All updates are already included in the github files, link at the end):
Updated R104, R105 to resistor value 470ohms for better reverse current protection threshold
Updated R101 to resistor value 16ohms for better stability
WHAT IS THIS?
What is an ideal diode? An ideal diode operates exactly as a traditional blocking diode that’s used to reverse current protection for a power path to protect the source from become the load and absorb power.
The only downside to using a diode is the power loss since most Shottky diodes, which is the a type of diode used primarily in power circuits, have a minimum voltage drop of 0.4V to allow current flow. This is an issue if you are trying to pass 50A through the diode which is a power loss of 10W which is a significant on design to eliminate that much heat from the diode.
The solution is to use is to use the ideal diode as a replacement for the Shottky diode. The ideal diode in summary is a linear op amp driving a mosfet with a low RDson internal resistance to turn on when current is flowing to the load and turn off when current tries to flow back to the source.
WHY DO WE NEED THIS?
Why is this circuit used and why is it needed?
The primary reason why I looked into this and designed this circuit was to have the ability to parallel multiple battery banks without having to worry if one of the banks ended up shorting out or having some fault that triggered the BMS system to turn off that particular bank.
This circuit is also known as an OR-ing diode because it allows the use of multiple parallel sources to help drive the load and the load alone. If one source has an issue then it can be removed without having to turn off the system to do so and in the case of a battery bank, it keeps it from either being charged from the other batteries in parallel in case of an over voltage condition and it keeps it from discharging to other banks in case of an under voltage condition.
HOW DO WE CREATE THIS?
How is this circuit made? Below I’ve created a discrete ideal diode using an op amp for driving and a Mosfet as the diode switch.
SPECIFICATION
Vinmin: 14V
Vinmax: 36V (This is limited by the mosfet and tvs diode, change those parts to increase input voltage range)
Imax: 30A ( This is dependent on the mosfet that is chosen, this rating is without a heatsink. I will perform test when I receive the actual boards as I used 2oz copper and should be able to handle more current without an issue. In theory this mosfet should be able to handle 400A with a proper heatsink)
SCHEMATIC
RENDERING
FRONT SIDE PCB
BACK SIDE PCB
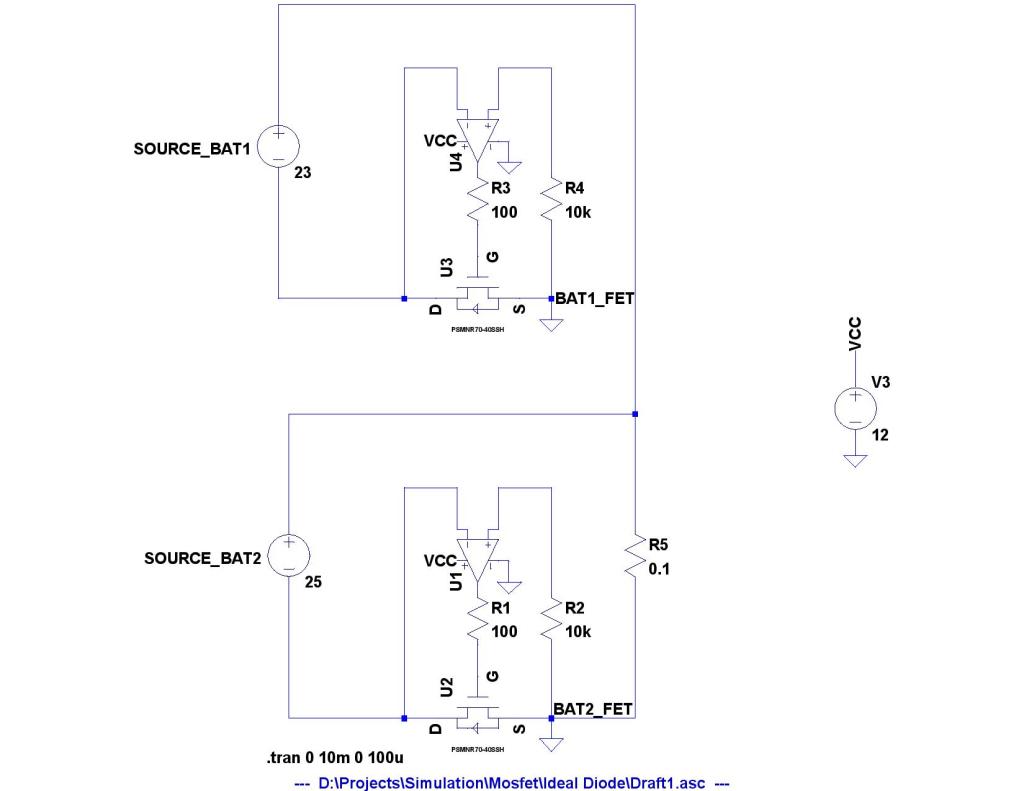
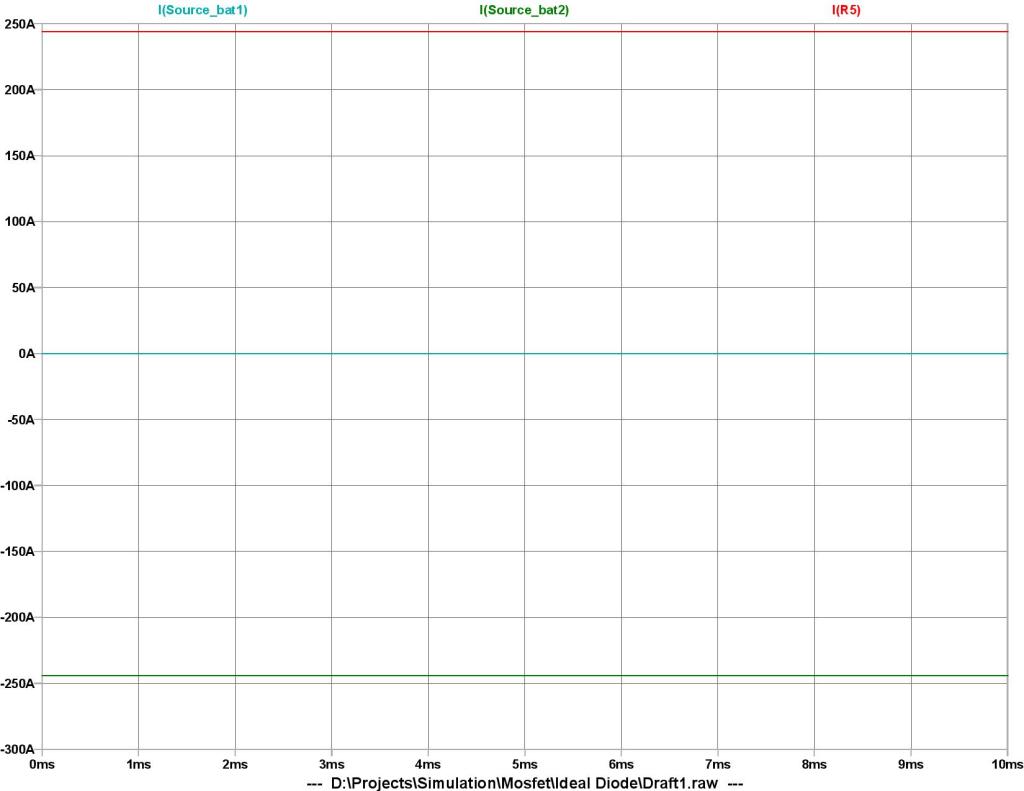
SIMULATION
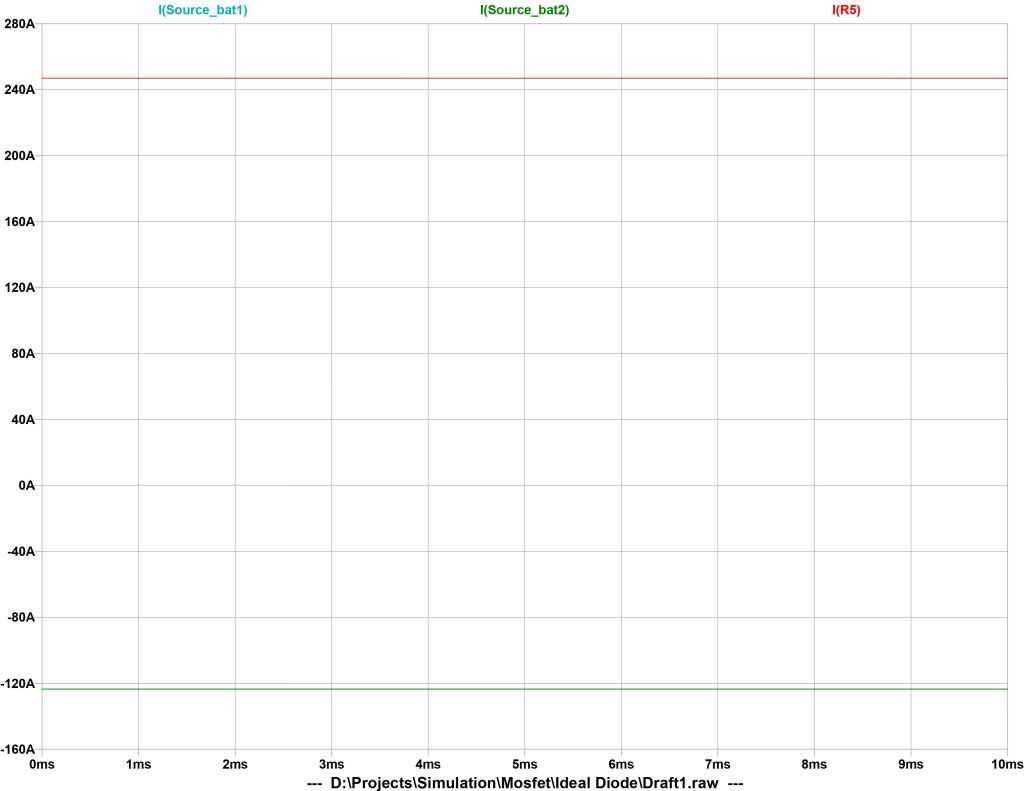
Below I also simulated the circuit and you can see what both the sources share the current when they are equal in voltage. But when source “BAT01” drops in voltage, which simulates either a faster discharge on that parallel cell or the bms turned off the battery pack due to a fault event, source “BAT02” is now providing all the current to the load. You can see that BAT01 ideal diode is blocking the current from charging the battery which is known as reverse current.
WHERECAN I DOWNLOAD THIS?
I’ve uploaded all the files, which included sources files and gerber, on my github below:
Like all my other projects, I’ve decided to create my own custom version of a cell monitor. Here we have an 8S arduino based voltage cell monitor that I designed to allow the user have control on how they monitor there batteries and how its displayed.
Its a very basic and not a lot of bells and whistles but still powerful enough to allow you to monitor cell voltages with accuracy and precision. This project is open source and so you will have the ability to add features or change them.
Specifications
Cell count: 8
Battery type: Li-ion, LiFePO4, NiMH
ADC resolution: 16-bit
Voltage measurement resolution: 1mV accuracy
Fault detection: Over-voltage, Under-voltage
I/O: 1-CH Digital output
The main purpose this is designed for is to measure an 8S Lithium Iron Phosphate pack up to 1mV resolution.
Hardware
Now here is were the fun part starts with the hardware used to create this DIY cell monitor. The main sections we will talk about are:
ADC
Power Supply
MCU
Menu Button Controls
ADC
Here we talk about the most important part of the project and that’s the ADC section. I’ve decided to go with two external 16-Bit adcs instead of the internal adcs of the arduino.
Since we need to step down the voltage from 30V max and need the best resolution possible. If we go with the internal adcs of the arduino, with a 10-Bit ADC we will only have resolution of 17mV/Bit. Now with 16-bit adcs, we have a resolution of 0.9mV/bit which is a huge increase.
I’ve decided to go with the ADS1119IPWR which is a 16-bit I2C adc. See below for a snip-it of the schematic:
ADS1119IPWR 16-Bit ADC x2
Power Supply
In the power supply section, we have a small profile buck converter that can handle up to 36V input. For this version I did not add a series fuse for the input of the buck converter but will add in second version. One this that was added was a tvs diode to protect the buck converter.
One thing I noticed is that when you plug anything into a high capacity battery bank, you need to protect your circuit from inrush current that causes a quick spike in current voltage that could damage your circuit before you even start. Adding a TVS diode will clamp this voltage and protect your circuit.
One thing I did change from the standard arduino board is use a cmos oscillator instead of the typical crystal oscillator. Honestly this is mostly a preference but it can be modified to use the typical crystal.
Menu Button Controls
Here is the schematic section for the control buttons. Its a little more complex than the typical push button design but this helps a lot with debounce.
We have a two stage design used to eliminate electrical debounce. First we have a passive RC low pass filter and then an inverting logic gate which adds some buffer to further reduce any false triggers.
Below is the full caption for all 4 input buttons:
Software
Normally I would breakdown every section of the code but its too large to fully go through the code. But I will go over the important sections:
Menu controls
ADC calibration
Menu Controls
In the control menu you are able to set the UVP value for cells and pack as well as the OVP value for cells and pack. In order to get into the menu screen you need to press the menu button and hold for about a second or two.
Once you are in the menu screen, you can navigate using the up and down buttons. Now even though I have the debounce circuit and a small software delay, the movement is still not smooth but it sufficient to operate.
In order to change the values, navigate for example to the OVP value with the arrow and then click the enter button to enter the OVP value screen. Using the up/down buttons you can increase or decrease the value by 0.05 increments. Once you are satisfied with your value then you can save the value by pressing the enter button and this will save to EEPROM so that its store permanently even after the power is removed.
ADC Calibration
Now before you can get accurate measured values, you need to calibration each ADC input to fix the offset from each IC.
You can calibrate using the serial monitor with an FTDI board connected to the UART port of the cell monitor.
The simplest way of calibrating each value is to measure each cell with a multimeter and write down the values.
Next, in the serial monitor, you need to enter the following:
Make sure not to include spaces as this will not calibrate if you do.
After the calibrate is complete, calibrated values are stored in EEPROM so that after power is removed then the board is still calibrated.
Conclusion
Even though you can buy an 8S lithium battery monitor with probably more features, this one gives you more flexibility and also the confidence that its doing what it is suppose to do.
If you have any comments, suggests, or feedback let me know in the comments below. Thank you.
Here is the link to the schematics and code on my github:
Like my previous post about this project, this is a customizable arduino based 4S BMS system. This is now version 7 of hardware and version 21 of software.
The benefit of using this over other low cost solutions is that gives a lot more feedback about what exactly its doing and control over how its doing it. For example setting the limit for the over voltage protection and under voltage protection value.
IMAGES
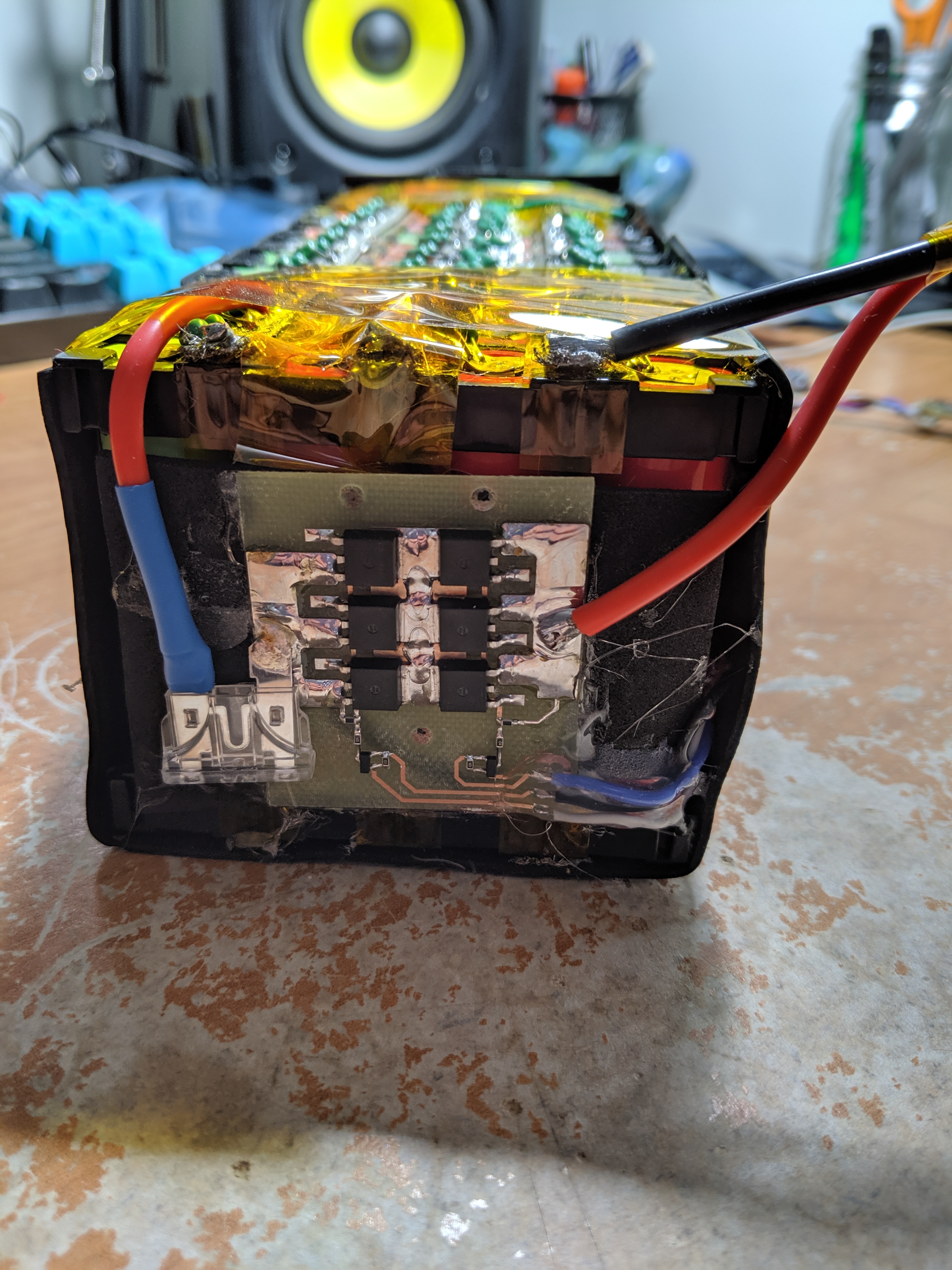
Here is a couple pictures of my BMS in action on a 4S11P 18650 pack.
FEATURE SET AND SPECIFICATIONS
Now to the key features that makes this project different from the rest:
Adjustable voltage tolerance (maximum difference between cells)
Display individual voltage cell values on an oled i2C display and/or serial print monitor over UART (TX, RX, GND)
Set under-voltage protection value and over-voltage values for series MOSFET
Adjustable balance current with a swapping of drain resistor up to 1A safely
Serial commands for adjusting variables and feedback:
Under voltage protection value
Over voltage protection value
Cell voltage tolerance
Request calibration values
Request status of UVP and OVP event and reset if triggered
Enter calibration mode to re-calibrate if needed for ADC inputs
NOTE: Arduino BMS A7 hardware is supported only with the current arduino software
HARDWARE
Now lets look into the hardware for this. There are 5 important sections in this board:
Power Section
MCU: Arduino ATMEGA328P running at 8MHz with minicore bootloader
Reference 1.25V voltage for ADC
Voltage dividers for cell measurement into ADC
Balance Section
Series MOSFET Section
POWER SECTION
One of the most important sections in this project is the power section. Key features I was looking for was low Quiescent current because this will be battery operated.
Quiescent current is the amount of current needed to operate an IC.
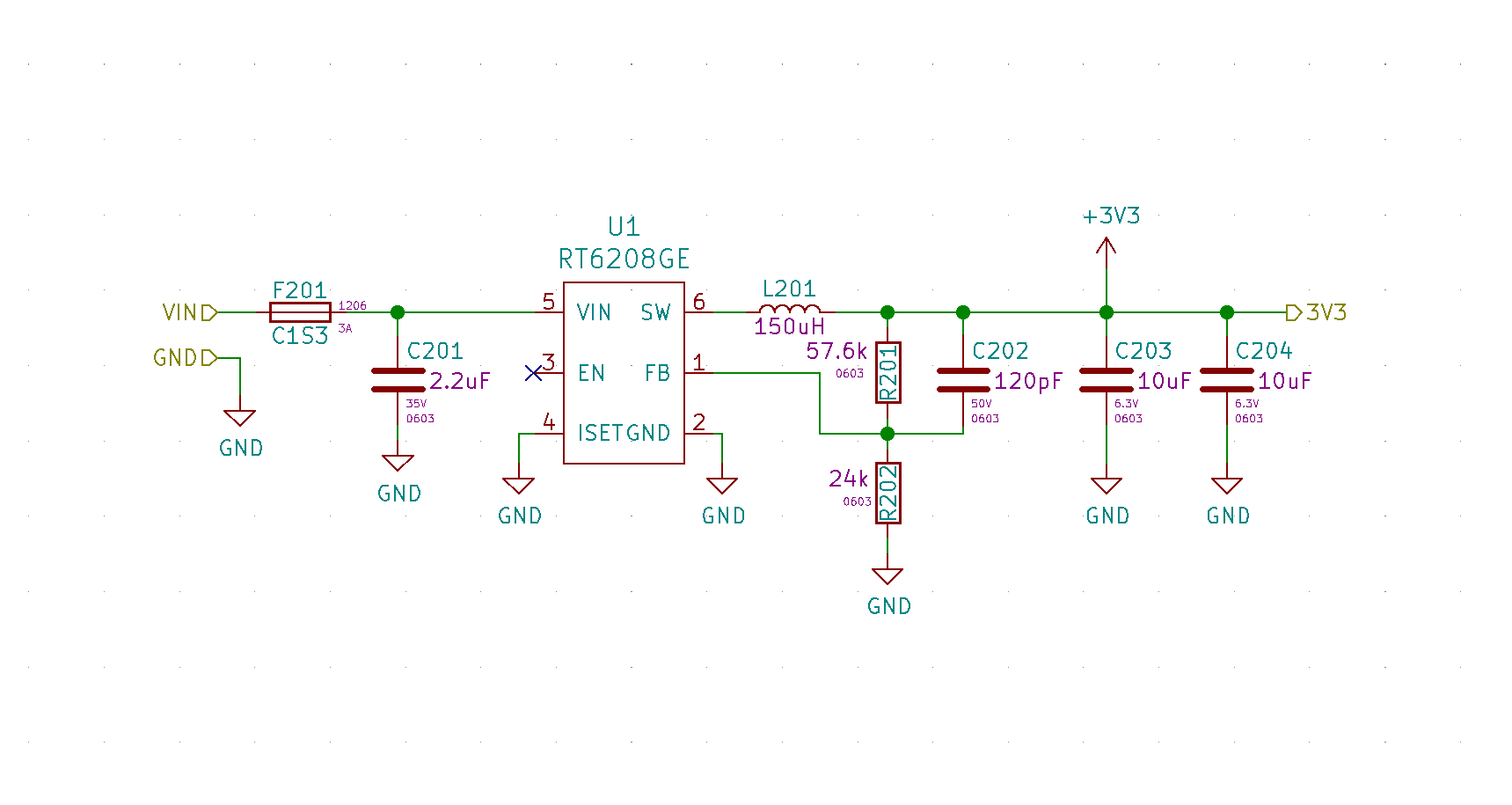
The current power IC I’m using is a buck converter RT6208G. I chose a buck converter over an LDO because of efficiency, again trying to keep the current draw from the battery low. Key features of this converter is:
Low quiescent current: less than 500nA or 0.5mA
High input voltage: 36Vin max
Small and compact
Efficient: around 80-90%
One thing to mention is that the buck converter I chose is currently out of stock and will not be available until November. I’m currently working on choosing an alternative but any buck converter will work with this.
Figure 1: Power Section
Anything here is that instead of stepping down to 3V3, I stepped down the voltage to 2V7. The image above is wrong and the FB resistor values are picked for an output voltage of 2V7 but it will function the same.
The reason for going with this voltage is because I was trying to minimize the current draw from the battery. I found that 2V7 is the minimum voltage I can use while still being able to use the I2C OLED screen.
MCU and REFERENCE VOLTAGE SECTION
The next section is the Arduino MCU and the external 1.25V reference.
Figure 2: MCU and Reference Section
Here you can see where the ADC pins are attached to the cell pins for measurements. And the digital pins for the control of the mosfets for the balance section. Its pretty straight forward here
On the bottom you can see the external 1.25V voltage reference. I’m sure there are different values I could have gone with but I figured that with a 1.25V I could try and increase resolution even after the voltage dividers. Without accounting for the voltage dividers for measuring the cells, we have a 1.22mV resolution. Not too bad but obviously it will increase with the voltage dividers.
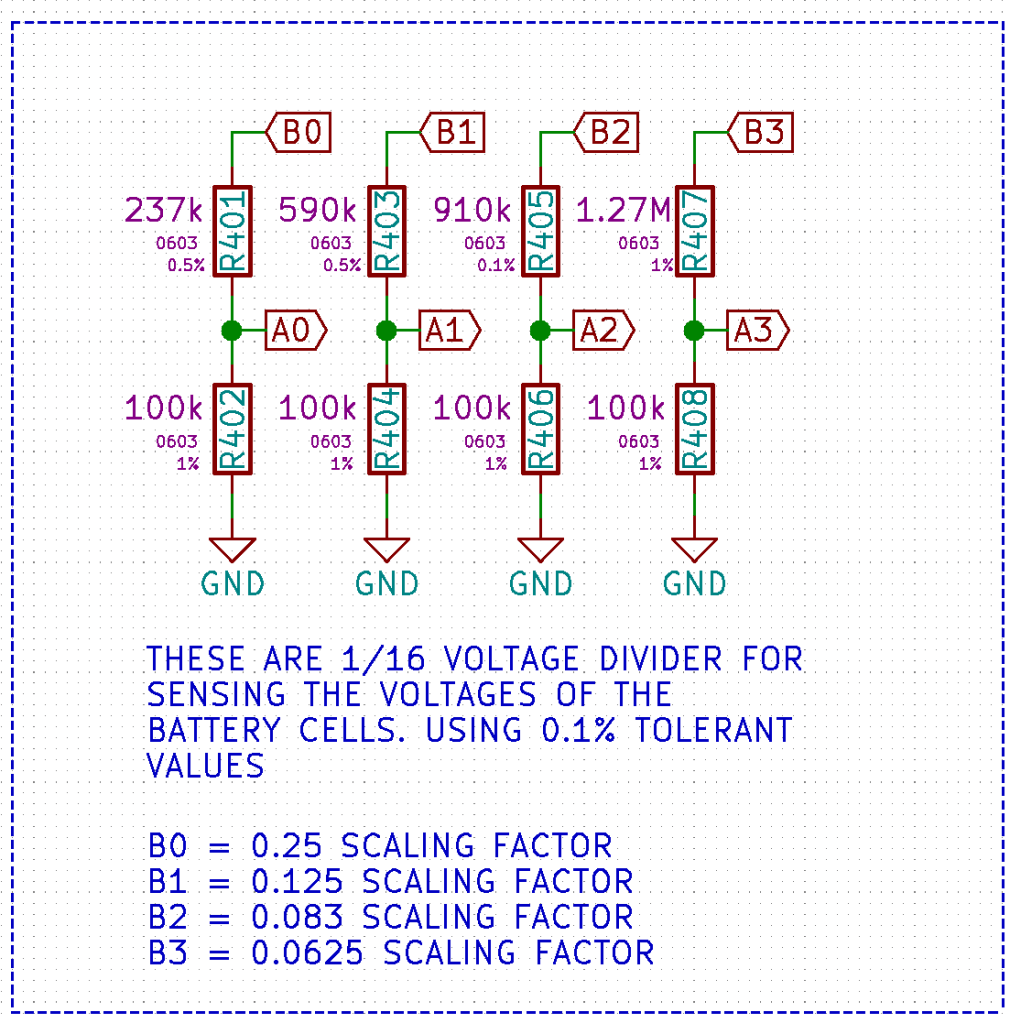
VOLTAGE DIVIDER SECTION
The next section is the voltage divider section which is used to step down the cell voltages to within the voltage reference value, in our case 1.25V max.
My values calculated were based stepping down the voltage value to within 1.20V, that is when a cell is at 4.2V then the divider will be 1.20V. This gives some margin in case the cells get overcharged.
Here you can see the divider circuit. Since the measurements are single-ended measurements and not differential, then everything is reference to ground and there for the higher in cell measurements we go the bigger the voltage divider we need.
I used 100k as the base resistor as I tried to minimize current consumption. The measurement cycle will be slower due to the arduinos 14pF capacitor but thats ok because we sample about 100 measurements to offset this.
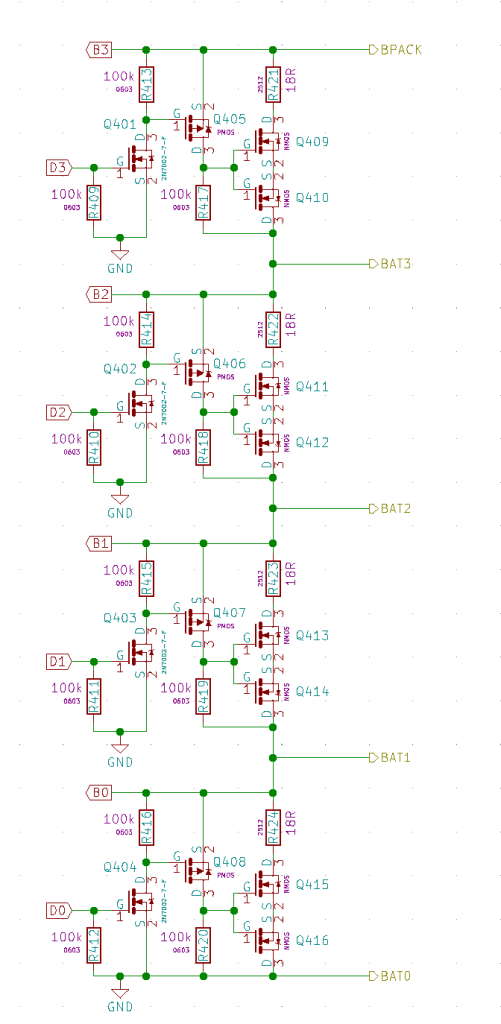
BALANCE SECTION
The last section is the balance section. Here the controllers turns off and on the mosfets corresponding to the cell its attached to. When the software determines that ex. cell 2 is higher than the lowest cell, then D1 is triggered and an 18 ohm resistor will start draining some current to let the rest of the cells catch up.
Figure 3: Balance Section
Looking at the bottom section of this circuit ( BAT0 / BAT1 ) you can see resistor value R424, this controls how much current is drained. At full charge of the cell 4.2V, you will see a current drain of 0.23A and then a minimum drain of 0.16A when the cell is at 3.0V.
Since the series mosfets are capable of 4.2A, you can theoretically lower the resistor value to drain more current but I do not suggest draining more than 1A at least with this board.
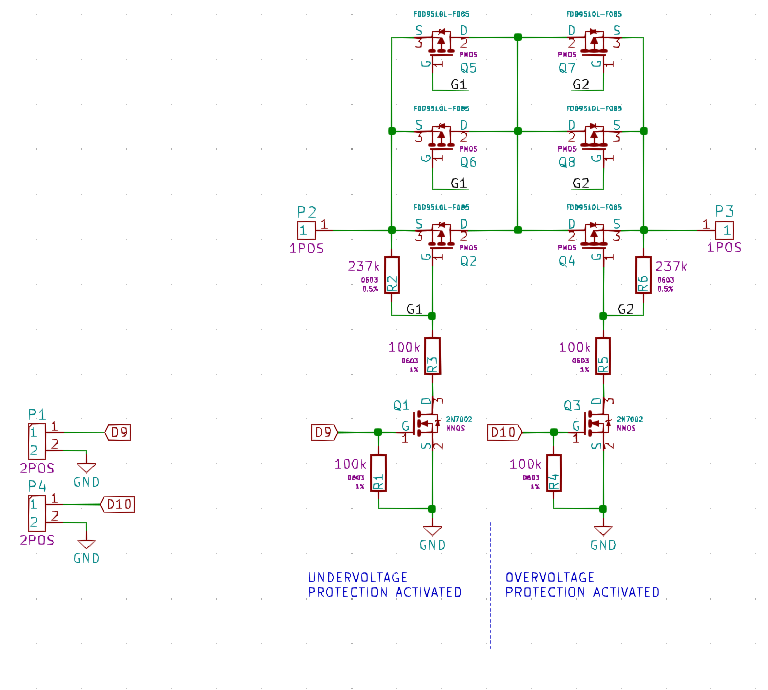
PROTECTION MOSFET SWITCH SECTION
This section was added for an extra layer of protection and is not needed for the bms balancing functionality to operate.
I’ve added a mosfet switch that utilizes the arduinos digital pin 9 and 10 to control power mosfets that are in series on the positive line of the battery.
Figure 4: MOSFET SWITCH
Theoretically each mosfet can handle around 10A without a heatsink and about 40A per mosfet with a heatsink for a total of 120A total. But here you can add more in parallel for higher current or change the mosfet for a higher current capable one. The mosfets used here are P_Channel mosfets for high side switching.
SOFTWARE
Now to cover the software side of this board, here I will only cover the important sections in which you might want to adjust for your own purposes. Most of the variables you would want to change can be accessed and changed via serial monitor using an FTDI while only connecting the TX, RX, and GND pins.
Here I will list the important sections:
Sampling frequency
Tolerance adjustment
Serial Commands
SAMPLING FREUENCY
//////////////////////////////////////////////
// Sampling number for analog read values.
// Will use this sample size to calculate a
// better estimation of the analog value
//////////////////////////////////////////////
int samples = 100;
Here in the samples variable you can change the value for how many samples the adc takes before creating an averaging of the cells. If you want a smoother value you can increase but I would not go past 250 samples. Remember this will also effect the amount of time it takes to display voltage values.
TOLERANCE ADJUSTMENT
//////////////////////////////////////////////
// This is the max difference that the cells
// can achieve in respect to each other
//////////////////////////////////////////////
float tol = 0.01; // 10mV max voltage difference
Here in the tol variable, it is used to as a reference for when the balancing of the cells should stop. The cells will balance until all cells are within 10mV of each other. This might not be exact because with the last 2 cells the register voltage different might be greater than 10mV due to a higher voltage divider but the measured voltage is around +/- 25mV of the actual cell voltage.
SERIAL COMMANDS
The most important part is the serial commands because this allows you to make changes without having to reflash the arduino.
Below we have a list of 6 serial commands that I will explain in details on how to enter the values into the serial monitor.
/* This is the table for entering into different modes and how to
* enter commands within serial console
*
* modes:
* 1. Display ADC calibration values = 1001
* 2. Enter adc auto calibration = 1002
* 3. Adjust minimum and maximum = 1003
* voltage threshold for OVP
* and UVP
* 4. Used to set all digital outputs
* to low = 1004
* 5. Erase all EEPROM values = 1005
* 6. Reset series switch value = 1006
* 7. Display status for Reset, UVP
* OVP state condition = 1007
*
*
* 1.Example of displaying calibration values
* Serial window: mode
* Serial window: 1001
*
* 2.Example of entering into auto calibration mode
* Serial window: mode,vref1,vref2,vref3,vref4
* Serial window: 1002,4.00,8.00,12.00,16.00
*
* 3.Example of entering UVP and OVP values
* Serial window: mode,UVP,OVP
* Serial window: 1003,3.10,4.15
*
*/
Lets look at the first command entry.
1001
This will display the calibration values that is stored in EEPROM
1002
This will enter calibration mode. Since there might be some offset from what the adc reads vs the actual value, I added a calibration mode that will add the offset to each adc value to try and get the values closer to the actual.
To enter calibration mode you will need to enter:
1002,vef1,vef2,vef3,vef4
The vef1-4 values are the actual measurements of the battery cells
Calibration setup:
Enter 1004 first to turn off all balancing MOSFETS
Measure each cell value with a multimeter to get the actual value
Then enter calibration mode by entering 1002,3.54,3.76,3.20,3.56 as an example for vef values
1003
This will adjust the values set for under voltage protection and over voltage protection. So if lets say 3.1V is set value for under-voltage protection then if any one of the cells drop below this value then the series FET will trigger if you have it attached.
This command is only valid if you use digital pin 9 and 10 for the series FET switch.
Enter 1003,UVP,OVP
1003,3.2,4.2
1004
Used to set all balancing values to low so that no cell is draining current. This is usually used for testing purposes.
Enter 1004,1 for setting all values to low
Enter 1004,0 to go back to normal balancing operation
1005
This is used to erase all eeprom values
1006
If UVP or OVP is triggered then you will need to reset this fault condition
Enter 1006,0
NOTE: If values are above or below the UVP and OVP values then resetting the 1006 command will not allow current to pass
CONCLUSION / FUTURE UPDATES
I’m very happy on how this project has progressed but its far from perfect and I will continue to optimize both the software and hardware to make it easier to integrate into a battery.
Future updates in my roadmap:
Optimize the Power MOSFET Switch circuit to handle higher currents
Possibly combine the mosfet control to one pin as using two might not be needed. UVP and OVP conditions open circuit the mosfet bidirectional switch
Add current sense capability for overcurrent protection.
My next big protection is creating a 7-8S BMS as well as a separate UVP, OVP, and Over-current protection board that will operate independently from the 8S BMS board but will still communicate via I2C to pass current data to the BMS board
If you have any questions or any suggestions or improvements please feel free to ask or comment.
I strive to provide my content for free without using ads as I personally do not like ads in most website. If you can afford to donate anything via Paypal i would great appreciate it. Thanks:
INTRODUCTION:
This project was created in order to provide protection for my battery projects. I didn’t really trust the cheap low cost protection boards you find online so I decided to try and create my own.
The protection board I’ve designed has bidirectional current detection (can detect charging and discharging currents) which in turn means you can set independent OCP( over-current protection) for discharging current and charging current.
One thing to note before hand is that the current maximum current that can flow is about 5A due to lack of heatsink on the powerFETS. Adding heatsink is necessary to allow more current
Main features:
Over current protection with output latch open when tripped
Under voltage protection for the whole battery pack
Theoretically 45-50A pass-through current ( will require heatsink)
In the next sections I will discuss in more detail this project.
SPECIFICATIONS:
Here are some more technical details of this project
Minimum input voltage (V)
10
Maximum input voltage (V)
34
Maximum current (A)
50A*
Quiescent current (mA)
**
Undervoltage protection
Yes (adjustable)
Overcurrent protection
Yes (adjustable)
Short circuit protection
Yes***
Overvoltage protection
No
*Maximum current passing through this board will depend on sizing and adding a heatsink to the power mosfets
**Quiescent current has not been measured yet but it is below 1mA during normal operation with a 4S battery. This will change slightly when using more cells in series
***Theoretical the supervisor IC will latch when the overcurrent protection section detects its threshold. This will need testing to confirm
SCHEMATIC AND CIRCUIT DETAILS
Here in this section I will discuss the project in more detail by talking about the different sections used to create this whole circuit.
Lets first discuss the over-current/short-circuit protection sections of the circuit:
Bidirectional Current sensor
Here we have the heart of the over-current detection. We have the MAX4081FASA which is a bidirectional current sense IC that can handle a max VCC of 76V which is more than enough for our applications. The FASA has an internal gain of 5V/V coupled with a 10 milliohm sense resistor value ( I have two 20 milliohm in parallel for size reduction) this will allow the sense current of up to 50A.
REF1A is tied to 5V reference IC and REF1B to ground. With this we have a bias point of 2.5V meaning that when no current is passing the voltage on the OUTPUT pin 5 is 2.5V. When current is discharging into a load the output will rise up to 5V being the 50A max. When current is flowing the other direction to charge the batteries then it will go below 2.5V to 0V being 50A max.
In order to both detect charging and discharging current since I will be using this for a battery pack, I had to create a circuit that detects both an upper limit and lower limit. Hence I went with a window comparator to detect charge and discharge values.
Window comparator with latching supervisor IC
Here is where you can adjust your own over-current detection points for charging and discharging and they can be set independently from each other. The idea here is when the output from the max IC is within the window of the voltage values you set from the voltage divider values on pin 3 and pin 6, the output of the opamp will be high. As soon as the output value goes above or below those set points, it will pull the output of the op-amp low and trigger the supervisor IC.
The supervisor IC is very important because this is what controls the power mosfets allowing current to pass through. This one is different from normal supervisor ICs because when this triggers, the output is latched low and this pulls the power mosfets high causing them to stop current flow. The only way to clear the fault condition is to pull the clear pin 1 to 5V. What I have done is add the option for a push button on the board directly or pads to run the clear pin trigger somewhere else.
Here is a simple equation to calculate the discharge current detection resistor values on PIN3 of the op amp:
(0.05 V/A * X) + 2.5V = VdetectHigher ; X = current trigger desired
For charging current detection here is the equation for the lower voltage detection of the op amp PIN 6
(0.05 V/A * X) – 2.5V = Vdetectlower; X = current trigger desired
Here is the power mosfets controlled by the supervisor IC. When no fault condition is triggered then the supervisor IC pulls Q4 to high causing the 10k resistor to be tied to ground. This then creates a voltage difference between the gate and source for the powerFETS allowing current to flow. When an overcurrent fault condition is triggered the supervisor IC is then pulled low and Q4 stops conducting which in turns unties the 10k resistor from ground and makes the gate and source the same potential.
Now the under-voltage protection scheme works by using a different supervisor IC measuring the input voltage. When the voltage falls below the threshold then the output pulls low and stops current flow in the powerFET
Here you see this circuit in action. A voltage divider is used to bring down the input voltage of the pack to a range the supervisor can handle. I have defined some voltage divider resistor values for different size battery packs in which it will trigger when the threshold is hit. I only used one MOSFET for this because this will stop discharging current but will allow charging current to flow via the body diode until the input voltage is above the threshold and then turn on the mosfet.
Here you have to take some precautions not to kill the mosfet when an event triggers an under-voltage event and you try to charge the pack.
When an event happens, start charging the pack with 0.5A-1A until there is about 1V above the under-voltage value. Then maximum current charging can be applied. This part of the circuit will need more tweaking in the future
CONCLUSION / IMPROVEMENTS
Hopefully this project will help someone out. I created this to help protect my batteries and to allow the flexibility to adjust as much values as I can and have as much control of my protection circuitry as possible. Of course this is not perfect and I am still working on improvements.
IMPROVEMENTS:
Figure out a way to protect Under-voltage powerFET from getting damaged when charging through the body diode initially until the supervisor IC allows current to flow through the FET and not the body diode
Use DPAK powerFETS instead of IPAK due to cost. Size increase is negligible or non-existent
Create a heatsink to provide maximum current discharge through mosfets. Currently the maximum current discharge without heatsink is roughly 5A without getting too hot. Will do testing after its completed.
This is an updated post regarding my 4S arduino based lithium ion balance management system (BMS).
If you click here, you will see the original post with details on the project.
IMPORTANT CHANGES:
Replaced external voltage reference to a more stable one. Upgraded to a REF3012AIDBZT from Texas instrument. This does not require an output capacitor for stability.
Modified Buck converter RT6208GE. Grounded pin 4 to set the max peak current to 50mA which is an average current of 25mA. This was done to eliminate audible oscillation from the buck converter
Increased copper traces for ADC pins A0-A3
Better layout to increase continuous copper plane on internal layer
updated 01/13/2019: For the new arduino version, load bootloader with 8MHz clock. I did more testing and this was more stable and accurate on the adc then the 1MHz clock setting.
I will be doing testing on these new versions and see how they perform. I will post results as soon as I can. Also below I will attach all files needed (schematics, gerber, bom) if you wish to make your own.
Now this might seem like it was a complete waste of time to try and reinvent the wheel with creating my owm custom BMS solution. You can buy them on ebay or alibaba or banggood for super cheap and it seems like a plug and play solution.
One problem I see with this, at least for me, is that I dont completely trust those cheap BMS system. I like to buy something that is reasonable as well as trusting that it will safely protect my cells from unbalancing. Another this is that I like to have flexibility with how I balance my cells or anything else.
Now this is where the custom arduino BMS came into play. I’ve designed this bms to handle a 4S battery pack so upto 16.8V fully charged and 14.8V nominal. The balance discharge current can be adjusted by simply replacing the discharge resistor with any value you wish. Just to add this does not have over current or over voltage protection..yet 🙂 I’m currently working on an add on for this so stay tuned for that future update.
Lets get started with all the cool details for this arduino bms.
3D RENDERING
Here i just wanted to show you the 3D rendering images of the final board. The rendering was created using kicad and its pretty nice actually for an EE cad software.
The heart of this system is the atmega328P running the minicore arduino bootloader[1]. From here you have the 4 balancing passive resistors to the right of the board. The best part of this project is that you can replace these resistors to any value you want to customize the balance current.
The one thing that this does not have is overvoltage and overcurrent protection but that will be a separate circuit later on ;).
Now we can talk about the main features below in the schematic section.
SCHEMATICS
Below are images of the full schematics for this project:
The first page of the schematic files is a hierarchy block level of the system to help understand how a lot of these subcircuits are linked together. Below I’ll breakdown all the pages and what exactly they do.
1. Hierarchy Block:
This is the overview block level that links the subcircuits on the separate pages. I normally like to design my projects this way if I have more than 2 subcircuits because its easier to see how things are working together
2. Power Supply
This section is just the power supply section to power the arduino. This is a high differential buck converter. The input voltage can go up to 36V and output down to 1.8V with an active quiescent current of only 190uA. Now the most important part is the quiescent current because we are trying to eliminate any wasted current since this is for a battery operated system and we do not want to drain the batteries faster than needed.
3. MCU
The MCU page has the Atmega328P and all the corresponding IO related to it. Im using A0-A3 to measure the batteries via a resistor divider
This page also includes the external reference voltage used instead of the built in 1.1V from the atmega328p. Its a 1.25V external voltage reference that has a better tolerance at a range of temperatures.
4. Balancing Circuit
This page has the balacing circuit which is incharge of discharging the battery cell that has a higher potentional. The heart of this is a bidirectional N-channel mosfet that allows current to flow in both directional either during discharge or during charging.
5. Connectors
This page has the power pin connectors and the BMS pads that connectors to the lithium cells.
Now that we’ve gone through the schematic lets go into the second most important part and that is the arduino code.
ARDUINO CODE
Now probably the second most important part is the arduino code that will control the mosfets triggering the discharge when a preset voltage difference is hit.
#include "Adafruit_SSD1306.h"
/* Revision: A9
* Written by: Steven Guzman
* Date: 7/10/2018
* Description: This is a customizable BMS system for a 4
* cell lithium ion pack.
*/
#include "Wire.h"
#include "avr/wdt.h"
#define OLED_RESET 4
Adafruit_SSD1306 display(OLED_RESET);
#define NUMFLAKES 10
#define XPOS 0
#define YPOS 1
#define DELTAY 2
//////////////////////////////////////////////
// This variable is used for checking on
// whether the OLED screen is attached or not
//////////////////////////////////////////////
int check = LOW;
//////////////////////////////////////////////
// Sampling number for analog read values.
// Will use this sample size to calculate a
// better estimation of the analog value
//////////////////////////////////////////////
int samples = 100;
//////////////////////////////////////////////
// This is the max difference that the cells
// can achieve in respect to each other
//////////////////////////////////////////////
float tol = 0.03;
//////////////////////////////////////////////
// To temporaly store analog values from the
// cell voltages to average out later with
// the number of samples taken
//////////////////////////////////////////////
float temp_cell[4];
//////////////////////////////////////////////
// Float array to store unconverted cell values
//////////////////////////////////////////////
float cell[4];
//////////////////////////////////////////////
// Variable array to store converted voltage
// values for cell measurement
//////////////////////////////////////////////
float B[4];
//////////////////////////////////////////////
// Variable array to store voltage differences
// between cells
//////////////////////////////////////////////
float diff[4];
/////////////////////////////////////////////////
// Variable used for digital output
// signals
/////////////////////////////////////////////////
int BAT[4];
/////////////////////////////////////////////////
// Variable used for storing the cell pack
/////////////////////////////////////////////////
float PACK = 0.000;
/////////////////////////////////////////////////
// Scaling factor used for converting
// the scaled down analogread values to there
// actual values from the voltage divider
/////////////////////////////////////////////////
float scale0 = 0.25; // 10k/(30k + 10k)
float scale1 = 0.125; // 10k/(69.8k + 10k)
float scale2 = 0.083; // 10k/(110k + 10K)
float scale3 = 0.0625; // 10k/(150k + 10k)
#if (SSD1306_LCDHEIGHT != 32)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
void setup()
{
Serial.begin(9600);
analogReference(EXTERNAL); // Configure reference voltage for
// external 1.25V
//////////////////////////////////////////////
// After switching to external reference you
// need to read a value a couple times before
// the reference has stabalized.
//////////////////////////////////////////////
analogRead(A0);
analogRead(A0);
analogRead(A0);
delay(20);
// Setup up watchdog timer to reset
// after 4 seconds
wdt_enable(WDTO_4S);
///////////////////////////////////////////////
// Variables to set the digital output
// pins 1-4
///////////////////////////////////////////////
BAT[0] = 5;
BAT[1] = 6;
BAT[2] = 7;
BAT[3] = 8;
///////////////////////////////////////////////
// Setting digital pins to output configuration
///////////////////////////////////////////////
pinMode(BAT[0], OUTPUT);
pinMode(BAT[1], OUTPUT);
pinMode(BAT[2], OUTPUT);
pinMode(BAT[3], OUTPUT);
///////////////////////////////////////////////
// Sets the digital outputs to an initial low
// state
///////////////////////////////////////////////
digitalWrite(BAT[0],LOW);
digitalWrite(BAT[1],LOW);
digitalWrite(BAT[2],LOW);
digitalWrite(BAT[3],LOW);
}
void loop()
{
Wire.requestFrom(0x3C, 1); // Pings OLED screen
///////////////////////////////////////////////
// If OLED pings back and check statement
// equals 1, then initiate the OLED screen
// and reset the check value to 0 so it will
// not continue to re-initiate. It needs to
// initiate another request one last time
///////////////////////////////////////////////
if (Wire.available() && check == HIGH )
{
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
check = 0;
Wire.requestFrom(0x3C, 1);
}
if ( Wire.available() && check == LOW)
{
// Leave blank
}
else if (!Wire.available())
{
check = 1;
}
///////////////////////////////////////////////
// Sets the temp variable array back to zero
///////////////////////////////////////////////
for (int x = 0; x <4; x++)
{
temp_cell[x] = 0.00;
diff[x] = 0.00;
cell[x] = 0.00;
}
///////////////////////////////////////////////
// For loop used to record battery cell voltage
// information and used later to average out
// the readings
///////////////////////////////////////////////
delay(100);
////////////////////////////////////////////////
// Using true RMS calculation for computing a
// better average estimate for multiple samples.
////////////////////////////////////////////////
for (int i = 0; i < samples; i++)
{
temp_cell[0] = temp_cell[0] + sq((analogRead(A0)/scale0)* (1.249 / 1024));
delay(1);
temp_cell[1] = temp_cell[1] + sq((analogRead(A1)/scale1) * (1.249 / 1024));
delay(1);
temp_cell[2] = temp_cell[2] + sq((analogRead(A2)/scale2) * (1.249 / 1024));
delay(1);
temp_cell[3] = temp_cell[3] + sq((analogRead(A3)/scale3) * (1.249 / 1024));
delay(1);
}
cell[0] = sqrt(temp_cell[0] / samples);
cell[1] = sqrt(temp_cell[1] / samples);
cell[2] = sqrt(temp_cell[2] / samples);
cell[3] = sqrt(temp_cell[3] / samples);
////////////////////////////////////////////////
// Scale up the cell values and then convert to
// to voltage values
////////////////////////////////////////////////
B[0] = (cell[0]);
B[1] = ((cell[1] - cell[0]));
B[2] = ((cell[2] - cell[1] ));
B[3] = ((cell[3] - cell[2] ));
PACK = B[3] + B[2] + B[1] + B[0];
///////////////////////////////////////////////////////////////////
// Compares each cell voltage to each other and then finds the
// lowest cell value. Then it stores the difference between the
// lowest cell and the remaining cells for comparison
///////////////////////////////////////////////////////////////////
if ( (B[0] <= B[1]) && (B[0] <= B[2]) && (B[0] <= B[3]))
{
diff[1] = B[1] - B[0];
diff[2] = B[2] - B[0];
diff[3] = B[3] - B[0];
}
else if ((B[1] <= B[0]) && (B[1] <= B[2]) && (B[1] <= B[3]))
{
diff[0] = B[0] - B[1];
diff[2] = B[2] - B[1];
diff[3] = B[3] - B[1];
}
else if ((B[2] <= B[0]) && (B[2] <= B[1]) && (B[2] <= B[3]))
{
diff[0] = B[0] - B[2];
diff[1] = B[1] - B[2];
diff[3] = B[3] - B[2];
}
else
{
diff[0] = B[0] - B[3];
diff[1] = B[1] - B[3];
diff[2] = B[2] - B[3];
}
//////////////////////////////////////////////////////////////////
// It enables the balancing protocol for a given cell that has a
// greater voltage difference from the lowest cell and the set
// tolerance.
//////////////////////////////////////////////////////////////////
delay(1);
for ( int x = 0; x tol )
{
digitalWrite(BAT[x], HIGH);
delay(1);
}
else
{
digitalWrite(BAT[x], LOW);
delay(1);
}
delay(1);
}
// text display tests
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print("V1:");
display.print(B[0]);
display.println("V");
display.print("V2:");
display.print(B[1]);
display.println("V");
display.print("V3:");
display.print(B[2]);
display.println("V");
display.print("V4:");
display.print(B[3]);
display.println("V");
display.setCursor(70,0);
display.print("VP:");
display.print(PACK);
display.print("V");
display.setCursor(70,8);
display.print("Config:");
display.print("4S");
display.display();
delay(1);
display.clearDisplay();
wdt_reset();
}
Lets break down this code in order to understand my thought process behind this.
The samples variable is used to create an average sampling of the battery cells to eliminate any noise issues. The averaging technique I used in this project is a little different than most but I will explain later on
The next variable is the tol variable. This variable is the maximum voltage different between the lowest cell and the rest of the cells in the 4S pack. Currently its set to a maximum of 30mV difference but this can be set to a minimum of 10mV because of the 8-bit adc on the arduino.
Here is the scaling factor for the adc from the cell measurements. We have different values because in order to get the best accuracy measuring in reference to ground, different values were needed for measuring cell 1 which has a max of 4.2V and cell 4 which measures a max of 16.8V.
This portion of the code is mainly for the OLED screen. It allows for the screen to be removed and re attached without having to reset the arduino. Before you had to initialize it in the setup but with this loop it is initialized in the main loop when it detects the screen.
Now this section is averaging the adc values from all 4 cells to get a best measurement of the cell voltage values. Instead of using the traditional sample 25 and take the average, I’m using a true RMS calculation that will give you a slightly better voltage measurement that just taking the average. It will be at a closer measurement to your multimeter than using average sample.
CONCLUSION / ISSUES
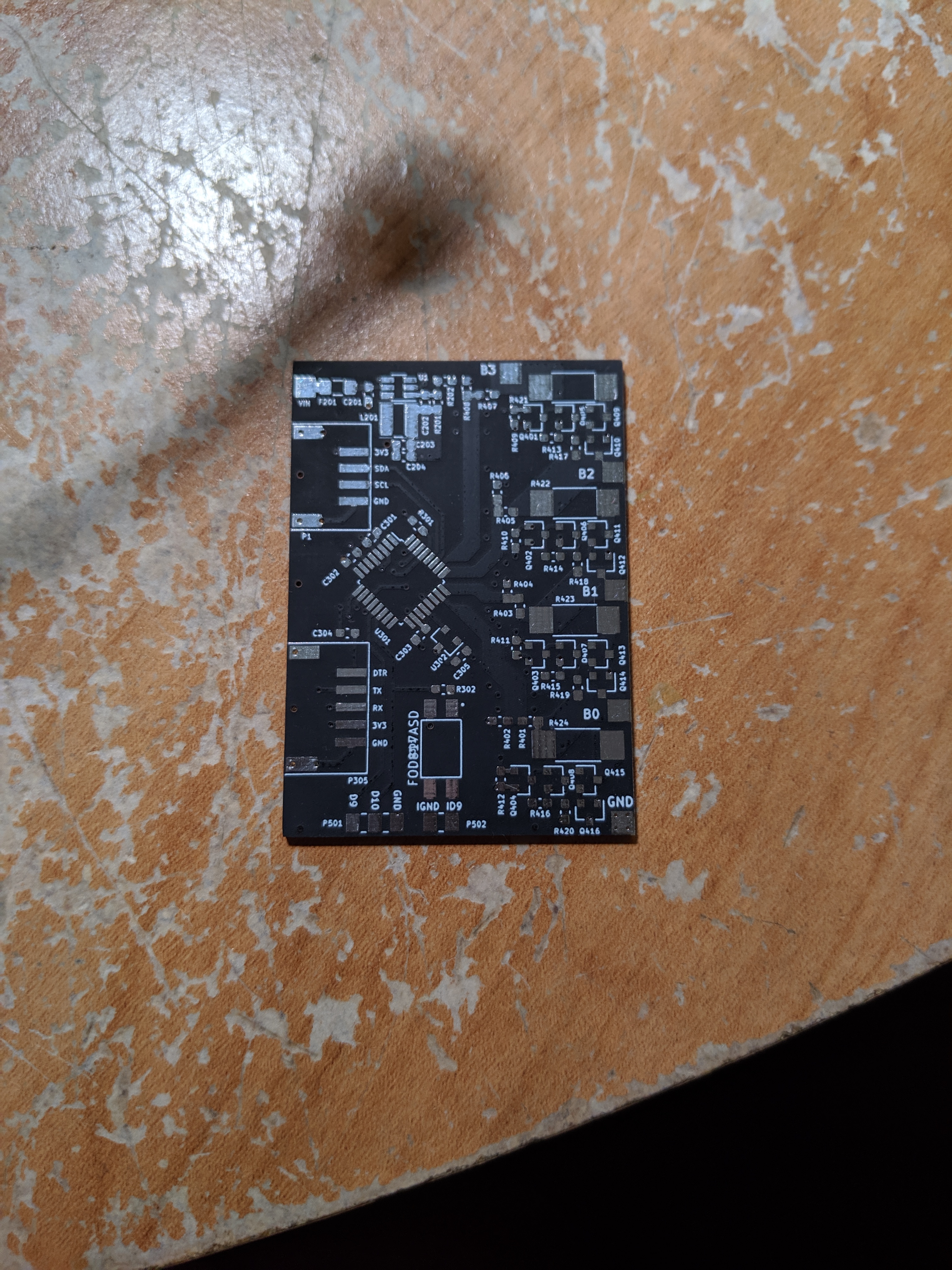
Here is the final PCB:
I’m pretty excited to do more testing on this and I will post my technical review later on that includes current consumption, maybe a mini manual on how to use it or change values for your own build.
Again this does not include an over voltage or over current protection circuit but I decided to make that a separate board with its own controller in order to make the board as small as I could and isolate the two circuits as a redundancy. I’m still making some tweaks and might make another revision but all in all I’m very happy about it.
Some current issues that I know off.
You might have to calibrate with a known good multimeter. The arduinos ADC has some weird issues with analogPin A2 measuring higher than the rest. I added a calibration value in the code to help with that.
1. Introduction
2. Bill of Materials
3. Schematic
4. 3D Redering
5. Final Thoughts
6. Download Original files
INTRODUCTION
With all the low cost CNC machines out in the market, there is also an abundant of GRBL shields for the arduino platform. Like always, I’m always looking to for ways to customize and improve whats in the market.
What I’ve created is a slightly better GRBL controller board for low cost CNC machines. This uses the Arduino Nano instead of the Uno as this allowed for more flexibility on the size of the board. It also integrates the relay switch for the spindle with an integrated flywheel diode to avoid over voltage spikes when the spindle is first turned on.
Below I’ll discuss in more detail along with the files you need to create this board.
Here in the schematic you can see a couple of items that are different from the traditional ebay/amazon grbl shields. First of all this is not a shield per say but more of a standalone controller board.
Since the capacitors that are used to filter the stepper drivers are 35V rated, I’ve limited the input voltage to 24V
I’ve added a TVS diode at the power input that protects from over voltage spikes.
Used better output connectors for the stepper motor drivers
Added 0.1uF capacitor for the probe pin for autoleveling
Added x3 5V rail connectors
One thing to add is that these connectors are taking power from the USB port and should not be loaded more than 0.2A combined
I added these for low current 5V noctua fans to cool the stepper drivers
Added relay control on the main board to eliminate adding external relay switch for the spindle.
some newer versions of the grbl software, I believe v1.1 has the spindle pin and z-axis switch so thats why I included the option to switch between the two
I believe you can switch this back in the firmware of the grbl settings. But none the less the option is there
The relay controller also includes a 1000uF and a flywheel diode to prevent voltage spikes on turn-on
3D RENDERING
Here is a 3D Rendering from Kicad of the board. I’ve added this rendering because I thought it looked really cool. FINAL THOUGHTS
Here is a picture of the final board below:
Below is the board fully soldered and it works amazing. I will add some images of the quality of boards my machine makes with the new controller board.
Future revisions of the board I will increase the 5V rail to supply up to 1A of current for high current draw fans and order accessory’s. Also, I will try to route out the limit switch pins. This will require me to remove the z-limit switch pin that connects to the spindle control but that should not be an issue.
If you have any comments or suggests please feel free to send them my way.